

11月7日至19日,“探索二號”科考船攜深海浮游式移動作業(yè)平臺(ROV)和中繼器赴南海開展TS2-19航次,該平臺完成了由淺到深3個級別(1500米,2500米和4500米)的海上試驗(yàn),最大工作深度達(dá)到4308米。該平臺在海試過程中工作正常,各項(xiàng)指標(biāo)達(dá)到設(shè)計(jì)目標(biāo),順利完成海試驗(yàn)證,結(jié)果表明該系統(tǒng)具備初步的作業(yè)能力,可以承擔(dān)深海科考、工程作業(yè)等任務(wù)。
該航次由中國科學(xué)院深海科學(xué)與工程研究所、長春光學(xué)精密機(jī)械與物理研究所,海南獅子魚深海技術(shù)有限公司,哈爾濱工程大學(xué)共4家單位參與實(shí)施,主要任務(wù)是開展中科院戰(zhàn)略性先導(dǎo)科技A類專項(xiàng)“深海/深淵智能技術(shù)及海底原位科學(xué)實(shí)驗(yàn)站”所研制的系列裝備的海試任務(wù),參試裝備包括浮游式移動作業(yè)平臺(ROV)、中繼器、深海生物基因測序儀等。
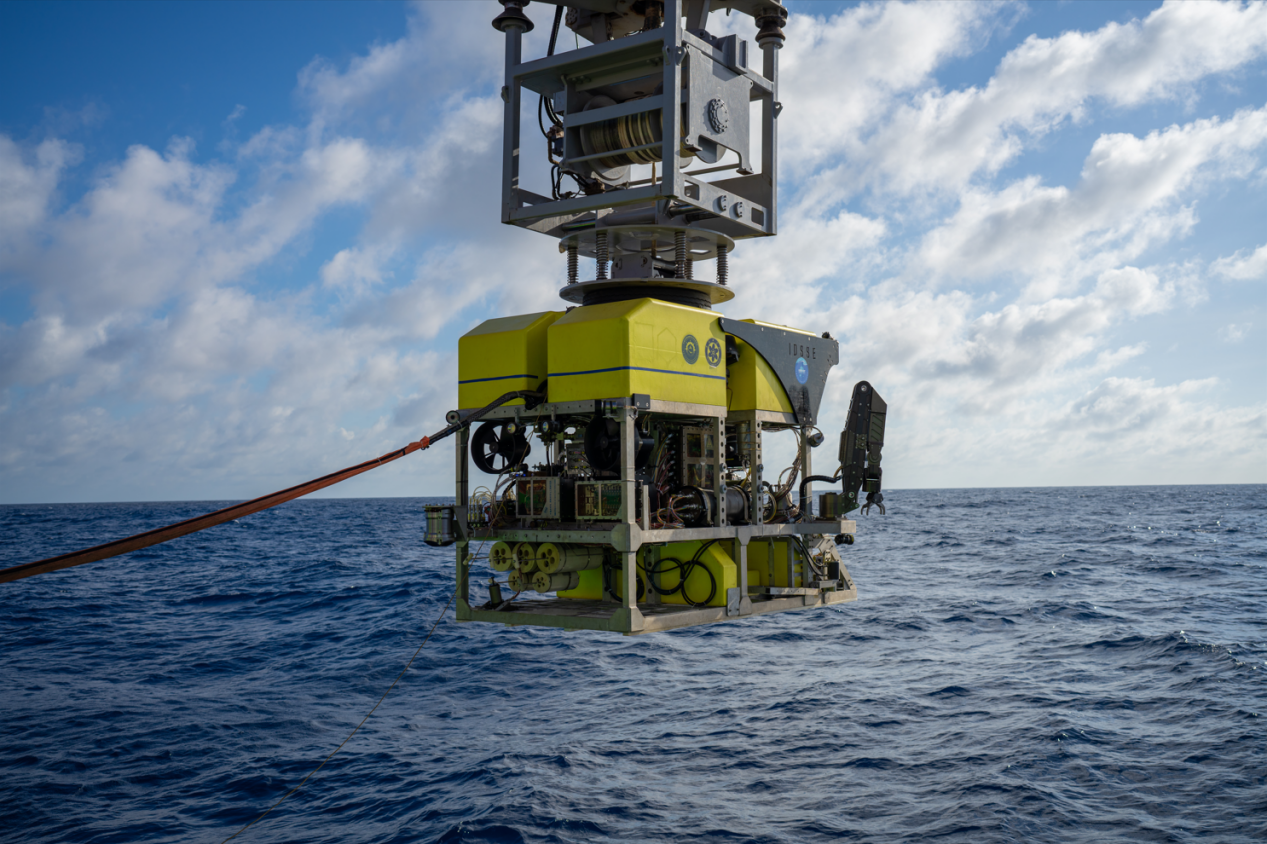
深海浮游式移動作業(yè)平臺(ROV)
深海浮游式移動作業(yè)平臺是深海所獨(dú)立研發(fā)的首臺ROV。該裝備以“探索二號”船為作業(yè)母船、以科學(xué)考察、工程應(yīng)用、應(yīng)急救援為主要作業(yè)任務(wù),可提供液壓、電力、通信、監(jiān)控及控制等多種通用接口,方便搭載各種作業(yè)工具及模塊開展深海底科學(xué)考察和工程作業(yè),其設(shè)計(jì)水深為6000米。該裝備大量采用自研部件,如多功能閥箱、模擬攝像頭、網(wǎng)絡(luò)攝像頭、SDI攝像頭、4K高清相機(jī)、水下LED燈、云臺等。其他主要部件都采用國產(chǎn)解決方案,如推進(jìn)器、水密接插件、浮力材、油泵等。
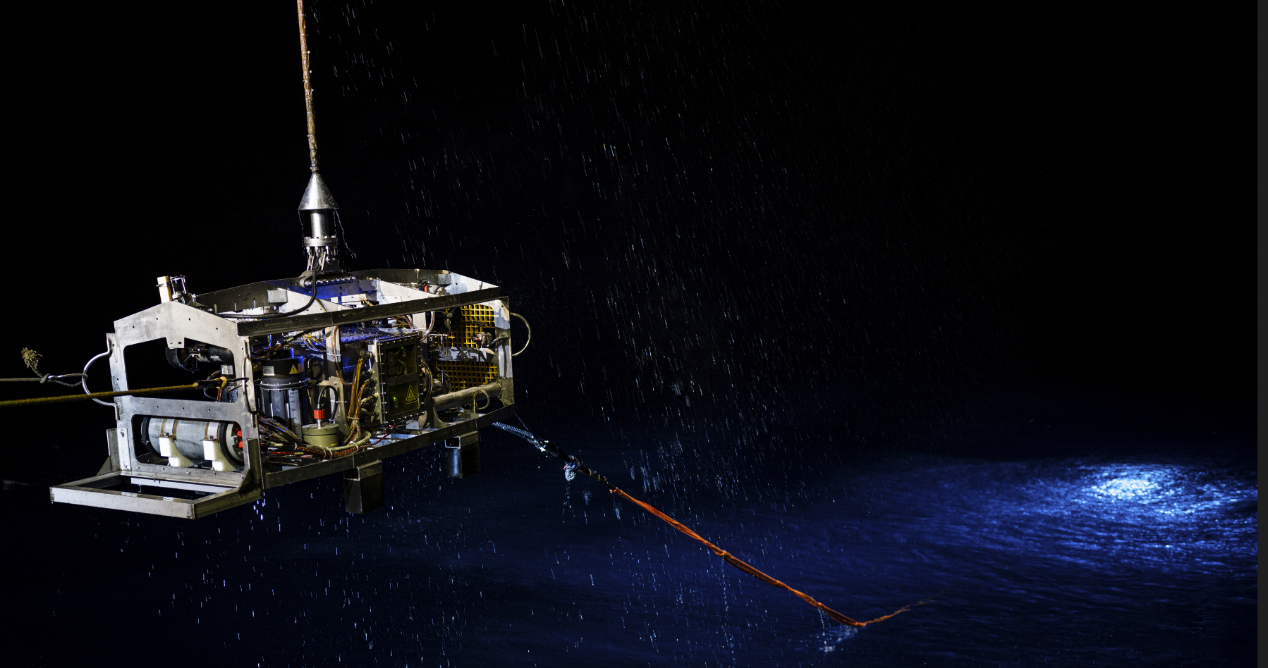
中繼器
本次試驗(yàn)采用的中繼器是深海所轉(zhuǎn)讓技術(shù)、江蘇新航船舶科技有限公司研制,最大工作水深為6000米,可提供電力、通信等多種通用接口,能搭載或者掛載多種類型的裝備、儀器、模塊開展深海作業(yè),如電視抓斗、科學(xué)類儀器等。該裝備曾經(jīng)搭載電視抓斗在應(yīng)急救援航次中發(fā)揮了重要作用,充分驗(yàn)證了其各方面性能。
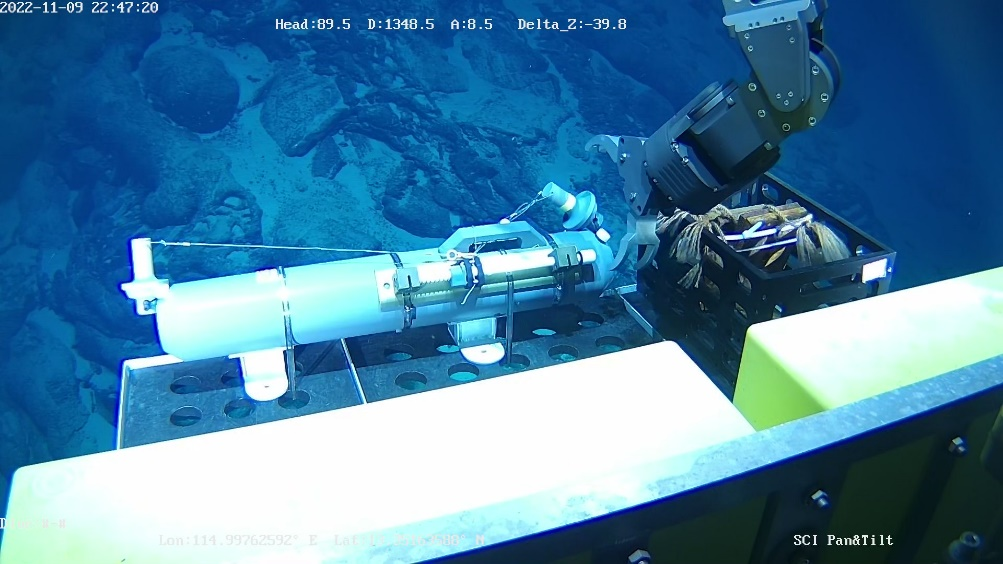
ROV機(jī)械手操作取水器
在本航次中,“探索二號”船通過光電復(fù)合鎧裝纜連接至中繼器,再通過非金屬輕質(zhì)光電復(fù)合臍帶纜連接至ROV。中繼器與ROV組成柔性連接的分體式系統(tǒng),該系統(tǒng)進(jìn)行了4500米級海上試驗(yàn)應(yīng)用,有效驗(yàn)證了“中繼器-ROV”的分體式布放-回收方案及測試流程,以及ROV各分系統(tǒng)及模塊的設(shè)計(jì)性能指標(biāo),并充分測試了ROV在4500m級大工作深度下的綜合作業(yè)能力,如定高、定深、定向、定速、樣品抓取收集等。

深海浮游式系統(tǒng)作業(yè)平臺顯控中心
該分體式系統(tǒng)與基于“探索二號”船的,具備供配電、甲板操作控制、視頻監(jiān)控等功能的水面控制單元組成一個完整的作業(yè)系統(tǒng)。整個系統(tǒng)可作為“探索二號”船的常用科考作業(yè)工具,能配合“探索二號”船完成更多深海科考任務(wù),全面提升“探索二號”船的作業(yè)能力。
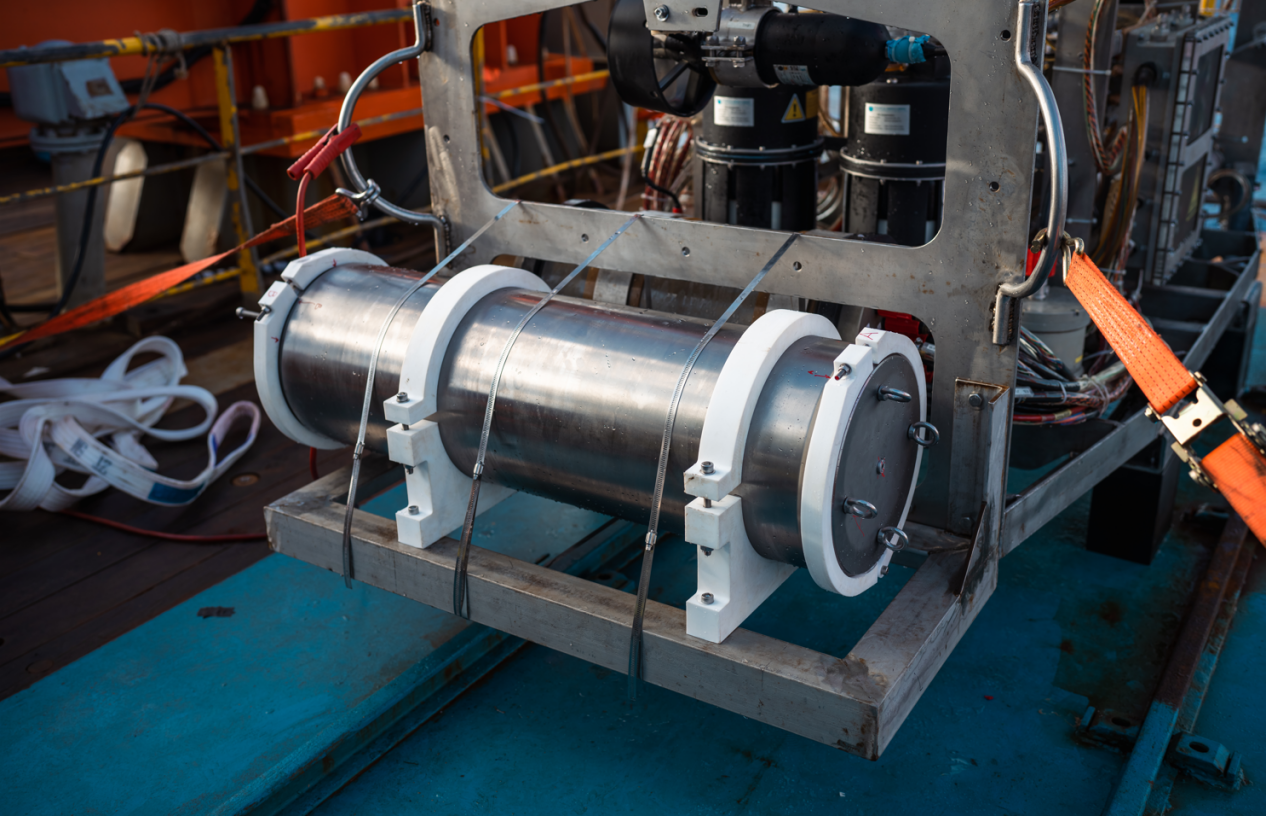
深海原位生物基因測序儀
本航次還進(jìn)行了深海原位生物基因測序儀的1800米功能性海上試驗(yàn)。該設(shè)備由中國科學(xué)院長春光學(xué)精密機(jī)械與物理研究所研制,并由中國科學(xué)院深海科學(xué)與工程研究所完成其水下化封裝。該設(shè)備搭載中繼器下放至1800米深度,并成功進(jìn)行了自帶生物樣品的測序和分析,為下一步與其它高性能生物類儀器聯(lián)合開展深海原位環(huán)境下的生物探測及分析打下了良好的基礎(chǔ)。
附件下載: