

在相同磁場下,協(xié)同控制多個(gè)磁驅(qū)動(dòng)微型機(jī)器人編隊(duì)運(yùn)動(dòng)是困難的,因?yàn)檩斎氲拇艌隹刂谱兞窟h(yuǎn)小于協(xié)同控制多機(jī)器人編隊(duì)位置與隊(duì)形的輸出自由度,導(dǎo)致了系統(tǒng)嚴(yán)重欠驅(qū)動(dòng)。
近日,中國科學(xué)院深圳先進(jìn)技術(shù)研究院集成所智能仿生中心團(tuán)隊(duì)針對(duì)控制系統(tǒng)欠驅(qū)動(dòng)問題,提出了一種基于改進(jìn)領(lǐng)航-跟隨法的多磁驅(qū)動(dòng)微型機(jī)器人編隊(duì)控制方法,首次實(shí)現(xiàn)了2個(gè)和3個(gè)磁性軟體微型機(jī)器人的編隊(duì)自主導(dǎo)航和路徑跟隨控制。研究成果以Leader–Follower Formation Control of Magnetically Actuated Millirobots for Automatic Navigation為題,發(fā)表在機(jī)電工程論域權(quán)威期刊IEEE/ASME Transactions on Mechatronics (JCR一區(qū),影響因子:6.4)。智能仿生中心徐天添課題組博士研究生黃晨陽為第一作者,徐天添研究員為通訊作者。
多個(gè)微型機(jī)器人可以協(xié)同執(zhí)行單個(gè)機(jī)器人無法完成的復(fù)雜任務(wù),從而增加系統(tǒng)的冗余度和擴(kuò)展性,提高任務(wù)的執(zhí)行效率。然而,不同于傳統(tǒng)多機(jī)器人系統(tǒng)中每個(gè)智能體可以獨(dú)立驅(qū)動(dòng),由外界全局磁場驅(qū)動(dòng)的微型機(jī)器人接收到相同磁場,從而造成耦合的運(yùn)動(dòng)速度。協(xié)同控制多個(gè)具有耦合速度的磁驅(qū)動(dòng)微型機(jī)器人編隊(duì)運(yùn)動(dòng)將導(dǎo)致了系統(tǒng)嚴(yán)重欠驅(qū)動(dòng),因?yàn)檩斎氲拇艌隹刂谱兞窟h(yuǎn)小于協(xié)同控制多機(jī)器人編隊(duì)位置與隊(duì)形的輸出自由度。
研究團(tuán)隊(duì)提出一種多磁驅(qū)動(dòng)微型機(jī)器人全自動(dòng)編隊(duì)導(dǎo)航控制框架,包括了基于增強(qiáng)RRT*編隊(duì)路徑與隊(duì)形規(guī)劃單元、基于改進(jìn)虛擬領(lǐng)航-跟隨法的多磁驅(qū)動(dòng)微型機(jī)器人協(xié)作控制單元和電磁驅(qū)動(dòng)單元。規(guī)劃單元中,提出的基于增強(qiáng)RRT*路徑規(guī)劃算法綜合考慮了避碰、路徑長度、搜索效率和電磁場分布特性,與其他RRT*及衍生算法相比,規(guī)劃路徑更趨向于電磁均勻分布區(qū)域。協(xié)作控制單元中包含一個(gè)具有擴(kuò)展?fàn)顟B(tài)觀測器的無模型跟隨者控制器,應(yīng)用于編隊(duì)隊(duì)形控制;一個(gè)基于模糊邏輯的領(lǐng)導(dǎo)者控制器,用于編隊(duì)路徑跟隨控制;一個(gè)基于耦合速度的協(xié)作控制器,用于控制多機(jī)器人的速度狀態(tài)。
通過實(shí)驗(yàn)驗(yàn)證了由2個(gè)磁驅(qū)動(dòng)微型機(jī)器人組成的編隊(duì)可以在保持編隊(duì)隊(duì)形約束下和變換編隊(duì)隊(duì)形約束下,實(shí)現(xiàn)高精度魯棒的路徑跟蹤控制。此外,由3個(gè)磁驅(qū)動(dòng)微型機(jī)器人組成的編隊(duì),可以通過自主隊(duì)形變換實(shí)現(xiàn)穿越狹窄障礙通道。最后,多機(jī)器人編隊(duì)通過提出的優(yōu)化路徑與隊(duì)形規(guī)劃算法,以及編隊(duì)協(xié)作控制方法,實(shí)現(xiàn)了障礙物區(qū)域自主避障和路徑跟蹤。本研究成果為多磁驅(qū)動(dòng)微型機(jī)器人編隊(duì)控制提供了新理論。在未來的工作中,我們期望通過提出的策略,多微型機(jī)器人團(tuán)隊(duì)將能夠高效地協(xié)同工作,用于體內(nèi)靶向藥物遞送、傳感和微組裝應(yīng)用。
該系列研究工作得到了國家重點(diǎn)研發(fā)計(jì)劃、國家自然基金、廣東省、中科院青促會(huì)、深圳市等科技項(xiàng)目資助。
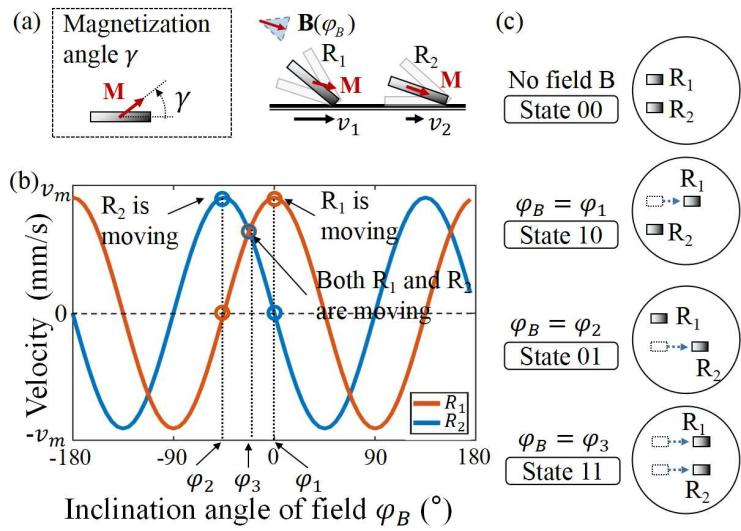
圖1:兩個(gè)磁化異構(gòu)的微型機(jī)器人具有耦合運(yùn)動(dòng)速度
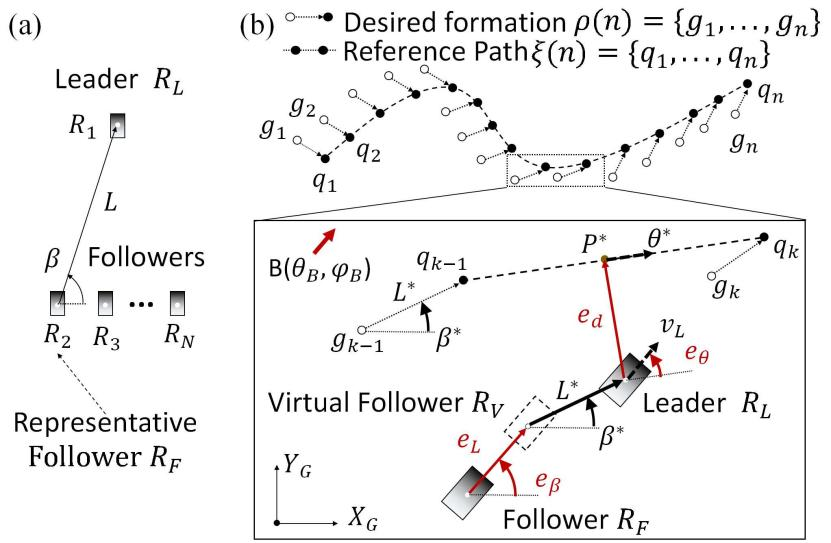
圖2:多磁驅(qū)動(dòng)微型機(jī)器人編隊(duì)控制問題描述
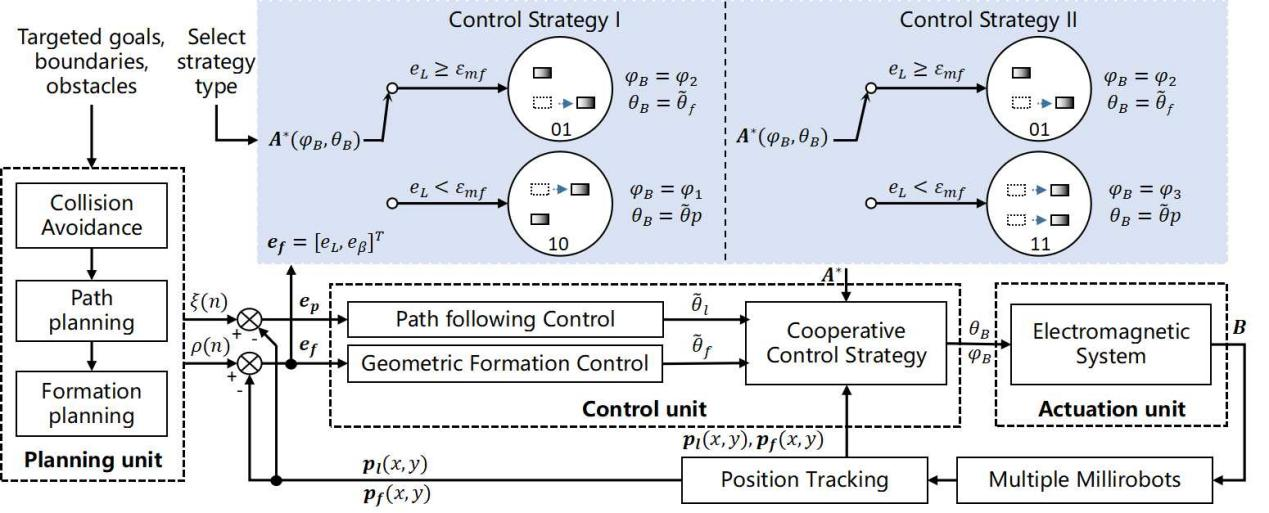
圖3:多磁驅(qū)動(dòng)微型機(jī)器人編隊(duì)控制框架
附件下載: