

近日,中國(guó)科學(xué)院深圳先進(jìn)技術(shù)研究院集成所智能仿生中心曹武警副研究員與香港中文大學(xué)、上海交通大學(xué)、東北大學(xué)科研團(tuán)隊(duì)合作,在外骨骼機(jī)器人領(lǐng)域取得新進(jìn)展。
團(tuán)隊(duì)研發(fā)了國(guó)際首款面向橫向行走步態(tài)的外骨骼,通過在橫向行走時(shí)施加主動(dòng)阻力力矩代替彈力帶被動(dòng)力矩,實(shí)現(xiàn)髖關(guān)節(jié)外展肌肉的精準(zhǔn)高效鍛煉,為抗阻橫向行走鍛煉提供了智能化新方法。研究成果以Development and Evaluation of a Hip Exoskeleton for Lateral Resistance Walk Exercise為題,發(fā)表在機(jī)電一體化領(lǐng)域頂級(jí)期刊IEEE/ASME Transactions on Mechatronics(JCR一區(qū),影響因子:6.4)曹武警副研究員為第一作者,吳新宇研究員為通訊作者,中國(guó)科學(xué)院深圳先進(jìn)技術(shù)研究院為第一單位。
髖外展肌肉肌力下降會(huì)導(dǎo)致骨盆平衡失調(diào),引起髖部疼痛,并出現(xiàn)腰痛和膝關(guān)節(jié)痛等癥狀。抗阻橫向行走是髖關(guān)節(jié)外展肌鍛煉增強(qiáng)的重要方式,彈力帶橫向行走是抗阻鍛煉增強(qiáng)髖關(guān)節(jié)外展肌最常用的康復(fù)運(yùn)動(dòng)之一。然而,彈力帶橫向行走鍛煉有以下缺陷:在橫向行走過程中,阻力不能主動(dòng)調(diào)整,即鍛煉強(qiáng)度不受控;鍛煉肌肉受姿勢(shì)、彈力帶位置影響,阻力作用的步態(tài)相位時(shí)段不可控,即鍛煉肌肉不精準(zhǔn);且當(dāng)彈力帶穿戴時(shí),前行會(huì)受影響,即鍛煉與自由前行不可兼得。當(dāng)前研發(fā)的外骨骼都是針對(duì)直行步態(tài),橫向行走步態(tài)與直行步態(tài)完全不同,尚無外骨骼可以直接應(yīng)用于抗阻橫向行走鍛煉解決上述問題。
團(tuán)隊(duì)研發(fā)了國(guó)際首款抗阻橫向行走鍛煉外骨骼,提出了自動(dòng)適應(yīng)不同身高與體重的多連桿機(jī)構(gòu)構(gòu)型,建立了考慮傳遞柔性與非線性摩擦力矩的外骨骼與人體耦合系統(tǒng)動(dòng)力學(xué)模型,提出了阻力力矩模糊整定PID控制策略,通過穿戴測(cè)試實(shí)現(xiàn)了臀中肌與闊筋膜張肌肌肉激活度的提高。
為了驗(yàn)證所提控制策略的有效性,分別采用傳統(tǒng)PID和模糊整定PID控制策略對(duì)外骨骼進(jìn)行了力矩跟蹤實(shí)驗(yàn)。結(jié)果表明所提出的模糊整定控制策略可以實(shí)現(xiàn)對(duì)阻力力矩的穩(wěn)定跟蹤,跟蹤誤差較小且具有更短的調(diào)整時(shí)間。
為了驗(yàn)證外骨骼對(duì)髖關(guān)節(jié)外展肌肉的鍛煉效果,比較了不穿外骨骼、穿外骨骼不開電、彈力帶和外骨骼主動(dòng)抗阻(10、15、20 Nm)條件下臀中肌與闊筋膜張肌的肌肉激活度,結(jié)果表明:所提出的髖關(guān)節(jié)外骨骼在主動(dòng)抗阻(10Nm)條件下,相比無外骨骼橫向行走,臀中肌肌肉激活度增加約6倍,闊筋膜張肌激活度增加約16倍。
此外,團(tuán)隊(duì)基于肌電的橫向行走步態(tài)識(shí)別研究Gait Recognition Based On sEMG And Deep Residual Shrinkage Network在國(guó)際機(jī)器人領(lǐng)域知名會(huì)議IEEE International Conference on Real-time Computing and Robotics (IEEE RCAR 2023)上獲得最佳學(xué)生論文獎(jiǎng)。團(tuán)隊(duì)碩士研究生羅明祥為第一作者,吳新宇研究員與曹武警副研究員共同指導(dǎo)學(xué)生完成。
該系列研究工作得到了國(guó)家自然科學(xué)基金杰出青年基金項(xiàng)目、中國(guó)科協(xié)青年人才托舉工程項(xiàng)目、國(guó)家自然科學(xué)基金深圳聯(lián)合基金重點(diǎn)項(xiàng)目、國(guó)家自然科學(xué)基金青年項(xiàng)目、深圳市自然科學(xué)基金面上項(xiàng)目等項(xiàng)目資助。
外骨骼代替彈力帶實(shí)現(xiàn)智能精準(zhǔn)抗阻橫向行走鍛煉
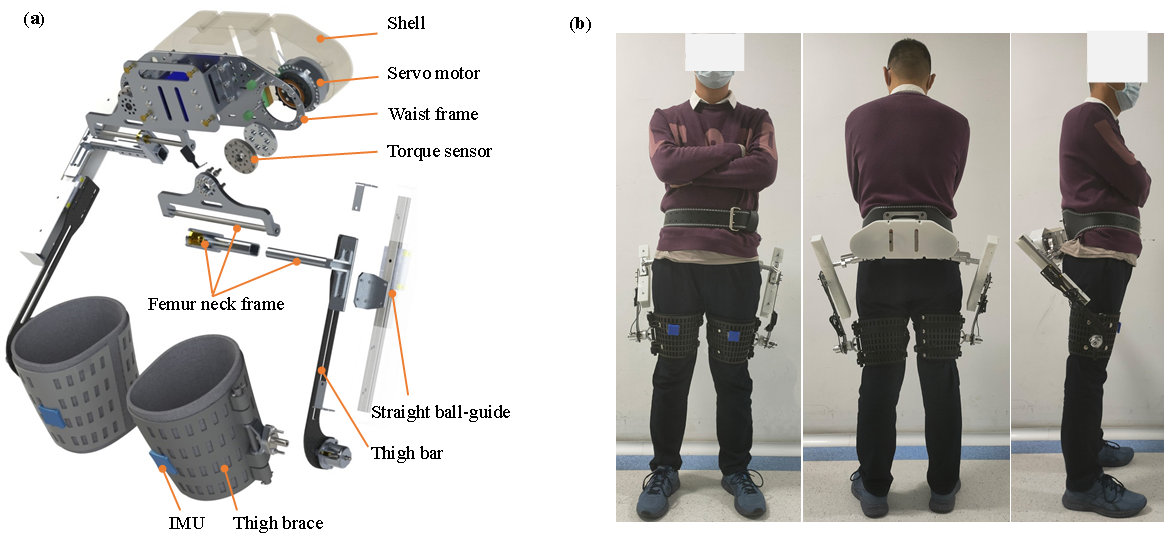
抗阻橫向行走鍛煉外骨骼系統(tǒng)及穿戴示意圖
髖關(guān)節(jié)外骨骼控制框圖
不同控制策略下力矩跟蹤效果
不同橫向行走條件下臀中肌和闊筋膜張肌的肌肉激活度
IEEE RCAR 2023最佳學(xué)生論文獎(jiǎng)證書
附件下載: